工作站一般是由什么组成(工作站的组成)
 冷ぺ雪°
冷ぺ雪°- 数码
- 2023-05-01 07:10:01
- -
什么是工作站
什么是工作站
工作站是一种高档的微型计算机,通常配有高分辨率的大屏幕显示器及容量很大的内存储器和外部存储器,并且具有较强的信息处理功能和高性能的图形、图像处理功能以及联网功能。
工作站根据软、硬件平台的不同,一般分为基于RISC(精简指令系统)架构的UNIX系统工作站和基于Windows、Intel的PC工作站。
UNIX工作站是一种高性能的专业工作站,具有强大的处理器(以前多采用RISC芯片)和优化的内存、I/O(输入/输出)、图形子系统,使用专有的处理器(Alpha、MIPS、Power等)、内存以及图形等硬件系统,专有的UNIX操作系统,针对特定硬件平台的应用软件,彼此互不兼容。
PC工作站则是基于高性能的X86处理器之上,使用稳定的Windows NT及Windows2000、WINDOWS XP等操作系统,采用符合专业图形标准(OpenGL)的图形系统,再加上高性能的存储、I/O(输入/输出)、网络等子系统,来满足专业软件运行的要求;以NT、WIN2000、XP为架构的工作站采用的是标准、开放的系统平台,能最大程度的降低拥有成本。
另外,根据体积和便携性,工作站还可分为台式工作站和移动工作站。
台式工作站类似于普通台式电脑,体积较大,没有便携性可言,但性能强劲,适合专业用户使用。
移动工作站其实就是一台高性能的笔记本电脑。但其硬件配置和整体性能又比普通笔记本电脑高一个档次
个人的计算机和大学里的电子阅览室都算工作站.
去毛刺机器人工作站有哪些组成单元
您好,去毛刺机器人工作站主要由以下组成单元:
1. 控制器:用于控制机器人的运动,并负责接收和处理输入信号;
2. 电机:用于控制机器人的运动,并负责提供动力;
3. 传感器:用于检测机器人的外部环境,并将信息传递给控制器;
4. 电池:用于提供机器人的电源;
5. 连接器:用于连接各个组件,以实现机器人的正常运行;
6. 支架:用于支撑机器人的外壳,以保护机器人的内部组件;
7. 软件:用于控制机器人的行为,以实现更复杂的功能。

工作站和台式机的区别
工作站和家用台式机的区别:
1、CPU处理性能要求不同:
三维图像处理过程由创建三维模型及执行几何运算开始。一个完整的三维图像处理过程可分为物理运算、几何转换、剪切及光效、三角形设定和像素渲染四个阶段,其中需要进行大量的浮点运算(包括物理实体、几何转换、剪切、光效,以及三角形设定)和整数运算(包括三角形设定和像素渲染)。
3D图形最终的渲染是由CPU完成的,这就需要CPU具有强劲的运算能力。如果建立一个大型的3D模型,单颗处理器的运算能力无法完成,这就需要双路甚至多路处理器的支持。而桌面处理器只支持单颗工作,在一般的图形制作中还可以胜任,在大型3D模型的建立中就有些不堪重负了。所以在工作站中应用的处理器一般是支持双路或者多路工作的服务器处理器,比如英特尔的至强处理器、AMD的皓龙处理器等。
2、芯片组平台不同:
在计算机系统中,处理器的性能并不能决定一切。主板芯片组的性能同样决定着整个系统的性能。在上文中提到,工作站一般采用性能更为强劲的服务器处理器,而要充分发挥处理器的性能,需要适当的芯片组作为搭配。应用于工作站领域的芯片组一般支持双路处理器,相对于普通PC主板芯片组具有更高的前端总线,支持更大容量的内存并且支持多通道内存技术,这样可以提供更大数据吞吐量。同时,芯片组的性能也关系着专业图形的能力。
3、内存技术和容量不同:
由于工作站需要长时间工作,对于系统的稳定性要求非常高。而内存如果出现错误,产生的后果是非常严重的。所以在工作站上一般应用了ECC技术,ECC被称作错误检测和纠正,可以检测1位或者4位数据错误,并且进行纠正。这样能有效避免随机出现的内存软错误,保证系统的高度稳定性。
除了ECC技术之外,现在工作站内存也应用了全缓冲技术,可以串行的进行数据传输,提高了数据传输速度,并且显著提高了数据传输带宽。而桌面PC系统是不应用ECC技术和全缓冲内存技术的。在内存容量支持上来说,工作站可以支持比PC大的多的内存,比如HP去年年底发布的HP xw8600工作站,理论上内存最大可以支持128GB。
4、存储系统不同:
目前普通PC上应用的硬盘接口一般为IDE或者SATA接口,硬盘转速一般为7200转;而工作站上更多的采用SCSI或者SAS接口硬盘,转速一般可以达到10000转或者15000转,并且可以组建磁盘阵列如RAID0/1模式。这样来看磁盘系统性能的优势相对于PC是非常明显的,可以提供非常高的数据存取速度,并且可以实现数据的冗余容错。
随着硬件的快速发展,计算机系统中处理器、内存的速度得到了大幅的提升,最终系统的瓶颈就落在了存储系统上,工作站上高速存储接口的应用和磁盘转速的提升,对工作站整体性能的提升是不言而喻的。
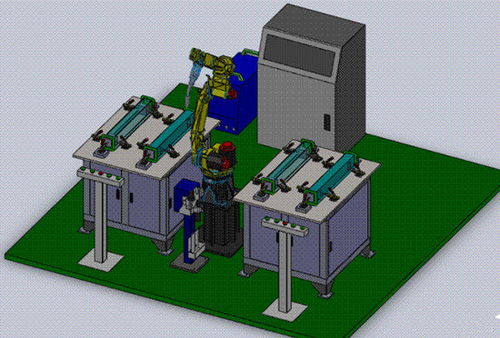
[img]弧焊机器人工作站由哪些部分构成
弧焊机器人工作站构成部分:
焊接机器人单元(一般的弧焊机器人是由示教盒、控制盘、机器人本体及自动送丝装置、焊接电源等部分组成。可以在计算机的控制下实现连续轨迹控制和点位控制。还可以利用直线插补和圆弧插补功能焊接由直线及圆弧所组成的空间焊缝。弧焊机器人主要有熔化极焊接作业和非熔化极焊接作业两种类型,具有可长期进行焊接作业、保证焊接作业的高生产率、高质量和高稳定性等特点。随着技术的发展,弧焊机器人人正向着智能化的方向发展。);
电源单元;
焊枪单元;
外部轴单元或焊接工作台(有:伺服行走滑台、伺服变位机、固定工作台、气动变位机、旋转台等多种方式);
夹具单元(有:全自动电控夹具、手动阀气动夹具、手动夹具);
安装结构单元(有:机器人底座、整体方便移动式大底板);
电气控制单元(有:PLC电气控制、操作控制台、启动按钮盒);
安全防护单元;
自动清枪站;
安全工作房。

本文由作者笔名:冷ぺ雪° 于 2023-05-01 07:10:01发表在本站,原创文章,禁止转载,文章内容仅供娱乐参考,不能盲信。
本文链接:https://www.3m3q.com/sm-92172.html
相关文章
随机推荐

7年前,王力宏在春晚后台怒扇刘谦耳光,当时究竟发生了啥(王力宏的负面新闻)
2023-01-24
哪里更新中国惊奇先生的漫画(未删减过的)(魔咒漫画未删下拉式啵乐)
2023-04-24
陆昂的父亲是谁(陆慷是陆定一的儿子)
2023-08-07
《封神英雄榜2》剧情介绍(1-72全集)(封神英雄一共72集)
2023-04-22
地狱十大恶魔(地狱恶魔图片壁纸)
2023-01-11
中秋节优美段落100字左右中秋作文100字优秀(中秋语段100字)
2023-03-12
关于允在的小说(郑允浩徐睿知)
2023-01-21
《风语者》免费在线观看完整版高清,求百度网盘资源(风语者国语在线看)
2023-01-21
热门文章

电影(冰山上的来客)的故事发生在现在的什么地方?(冰山上的来客 电影 1963)
2023-04-24
做梦见到凶案现场发现死人好吗(梦见自己搬运死尸)
2023-09-09
吴奇隆刘诗诗结婚时间(吴奇隆刘诗诗婚礼时间)
2022-12-22
甄嬛传中的四阿哥扮演者(四阿哥弘历是哪个皇帝)
2023-03-07
毛孔粗大是什么原因造成的 四个原因你中了哪一个(毛孔粗大怎么修复)
2023-06-01
绝世唐门吧的简介(绝世唐门之神之灵女)
2023-01-24
2022荷花奖几年一次(荷花杯舞蹈大赛)
2023-04-17
盘他是什么意思(盘他 网络流行语)
2023-06-08